SILNIKI ELEKTRYCZNE STOSOWANE W ELEKTRONARZĘDZIACH I MASZYNACH (CZĘŚĆ III). SILNIKI ASYNCHRONICZNE
W poprzednich częściach cyklu omówiliśmy krótko historię powstania techniki napędów potrzebnych do konstruowania maszyn i urządzeń. Opisaliśmy budowę i zasadę działania podstawowego rodzaju silnika elektrycznego, czyli silnika asynchronicznego. W trzeciej części zajmiemy się sposobami rozruchu tego typu silników, które są uzależnione od konstrukcji napędzanych przez nie urządzeń.
Uruchamianie silnika asynchronicznego może być dokonywane przez rozruch bezpośredni, rozruch „gwiazda-trójkąt”, rozruch przez zmianę rezystancji w obwodzie wirnika oraz rozruch z zastosowaniem łagodnego startu 3-fazowych silników indukcyjnych sterowanych układami „soft-start”. Podstawowym rodzajem rozruchu w przypadku silników o małych mocach (do kilkunastu kW) jest rozruch bezpośredni. W tym przypadku pobierany prąd rozruchu jest nawet do ośmiu razy większy niż prąd znamionowy. Powoduje to nagrzewanie się uzwojeń, a także może prowadzić do spadków napięcia w sieci zasilającej. Ponieważ wartość powstającego momentu elektromagnetycznego nie jest zbyt duża, silnik nie może być zbytnio obciążony, aby mógł wystartować. W przypadku większych urządzeń, których konstrukcja pozwala na zastosowanie kilku napędów, np. obróbka wielowrzecionowa czy centra obróbcze, możemy stosować rozruch bezpośredni, unikając jednak rozruchu jednoczesnego.

Jeśli konkretne urządzenie wymaga silnika o większej mocy, stosowane są inne rodzaje rozruchu, np. „gwiazda-trójkąt”. Rozwiązanie to jest możliwe tylko dla silników 3-fazowych, które mają wyprowadzonych 6 zacisków na tabliczce zaciskowej, co umożliwia odpowiednie podłączenie uzwojeń stojana w gwiazdę lub w trójkąt. Zastosowanie przełącznika rozruchowego typu „gwiazda-trójkąt” jest sposobem na zmniejszenie prądu rozruchowego oraz ograniczenie spadków napięcia w instalacji elektrycznej.
Połączenie w gwiazdę polega na połączeniu końców wszystkich trzech uzwojeń do jednego wspólnego punktu, a pozostałych trzech końców do kolejnych faz sieci zasilającej. W ten sposób każde z uzwojeń stojana podłączone jest jednym końcem do przewodu neutralnego N, a drugim do przewodu fazowego (L 1, L 2 lub L3). Na każdym z tych uzwojeń występuje napięcie fazowe (w naszych warunkach wynosi ono 230 V). Połączenie w trójkąt polega na połączeniu końca uzwojenia danej fazy z początkami uzwojenia fazy następnej (punkt U2 łączony z V1, V2 z W1 a W2 z U1). Połączone w ten sposób uzwojenia tworzą zamknięty obwód wyglądem przypominający trójkąt. Punkty wspólne uzwojeń łączone są następnie do kolejnych faz sieci zasilającej. Przy tym połączeniu na każdym z uzwojeń występuje napięcie międzyfazowe (w naszych warunkach wynosi ono 400 V). Przy połączeniu uzwojeń silnika w trójkąt prąd pobierany przez silnik z sieci jest trzykrotnie większy niż prąd pobierany przy połączeniu w gwiazdę. Także moment elektromagnetyczny, a więc i moc silnika, w tym przypadku są trzykrotnie większe.
Stosując przełącznik „gwiazda-trójkąt”, możemy uruchomić silnik połączony w gwiazdę, przez co będzie mniejszy pobór prądu z sieci zasilającej, a następnie po osiągnięciu przez silnik odpowiedniej prędkości obrotowej, przełączyć uzwojenia stojana w trójkąt, aby silnik mógł zapewnić pożądaną moc.
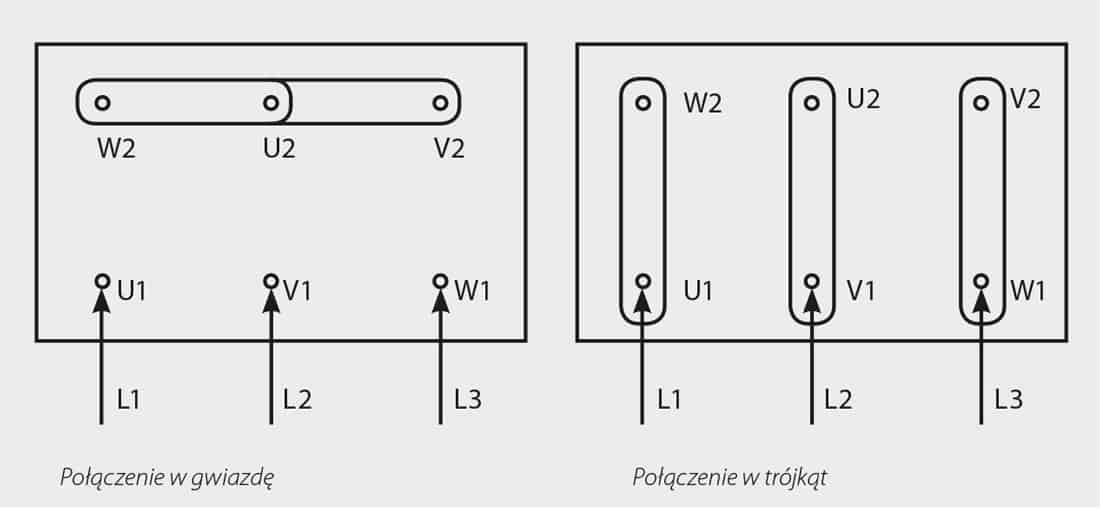
Rys. 1. Połączenia końcówek uzwojeń silnika asynchronicznego
W starszych, klasycznych rozwiązaniach przełączenie dokonywane było ręcznie przez operatora, obecnie w podzespołach załączania stosuje się układy styczników i przekaźników dokonujące automatycznego przełączenia po zadanym wcześniej czasie. Połączenie końcówek uzwojeń silnika asynchronicznego w gwiazdę i w trójkąt na tabliczce zaciskowej przedstawia rys. 1, zaś połączenie uzwojeń stojana silnika asynchronicznego w gwiazdę i w trójkąt przedstawia rysunek poglądowy rys. 2.
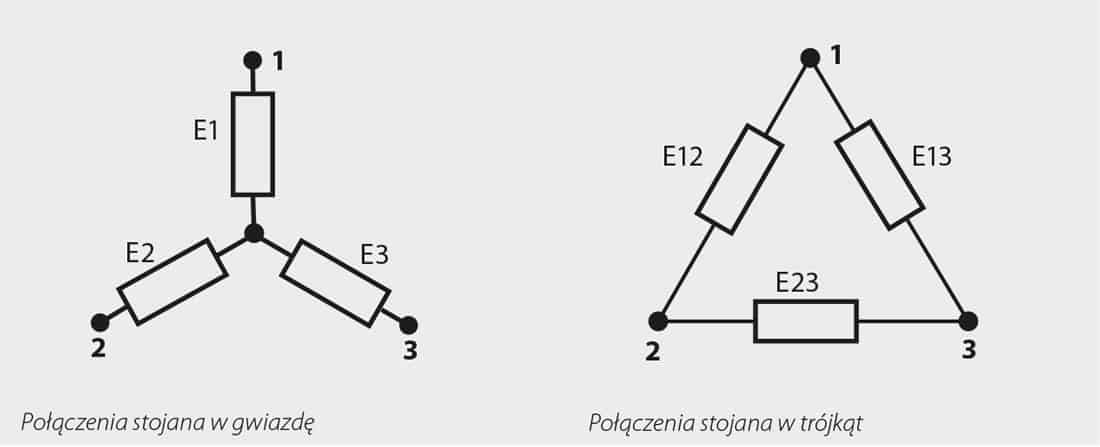
Rys. 2. Połączenia uzwojenia stojana
Innym sposobem rozruchu silnika jest rozruch przez zmianę rezystancji w obwodzie wirnika. Tego rodzaju rozruch stosowany jest w przypadku silnika pierścieniowego. Funkcję tę realizuje się przez zastosowanie dodatkowych rezystorów przyłączanych do uzwojeń wirnika. Rozwiązanie to powoduje spadek prądu wirnika, a zatem również spadek prądu pobieranego z sieci. Wadą, podobnie jak w przypadku rozruchu typu „gwiazda-trójkąt”, jest mniejszy moment rozruchowy silnika. Ze względu na skomplikowaną budowę i koszty utrzymania konstrukcja ta jest obecnie rzadko stosowana.

W nowoczesnych układach napędowych spotykamy rozruch z zastosowaniem łagodnego startu 3-fazowych silników indukcyjnych sterowanych układami „soft-start”. Stosuje się w takich przypadkach specjalizowane urządzenia nazywane układami miękkiego rozruchu. Mają one za zadanie redukuję niekorzystnych zjawisk występujących w momencie rozruchu, wpływających na żywotność silników oraz jakość ich pracy. Zasada działania opiera się na płynnej regulacji napięcia podawanego na uzwojenia. Rolę elementów sterujących pełnią najczęściej tyrystory. Zwykle urządzenia takie umożliwiają kontrolę i możliwość nastawienia wielu parametrów, takich jak czas rozruchu, wartość początkowego momentu rozruchowego, kolejności faz i czy temperaturę przegrzania.
Jak wiemy, nowoczesne urządzenia wymagają również bardzo dokładnej stabilizacji obrotów bądź precyzyjnej ich regulacji. Sposobami realizacji tych zadań zajmiemy się w następnym odcinku niniejszego cyklu.
TomaszŻurkowski